舵机对比伺服电机步进电机有哪些优点?
时间: 2024-04-22 05:57:45 | 作者: 米乐体育怎么充值会员
在讲这样的一个问题之前,先粗略地介绍一下舵机、伺服电机、步进电机是什么以及它们的优缺点。
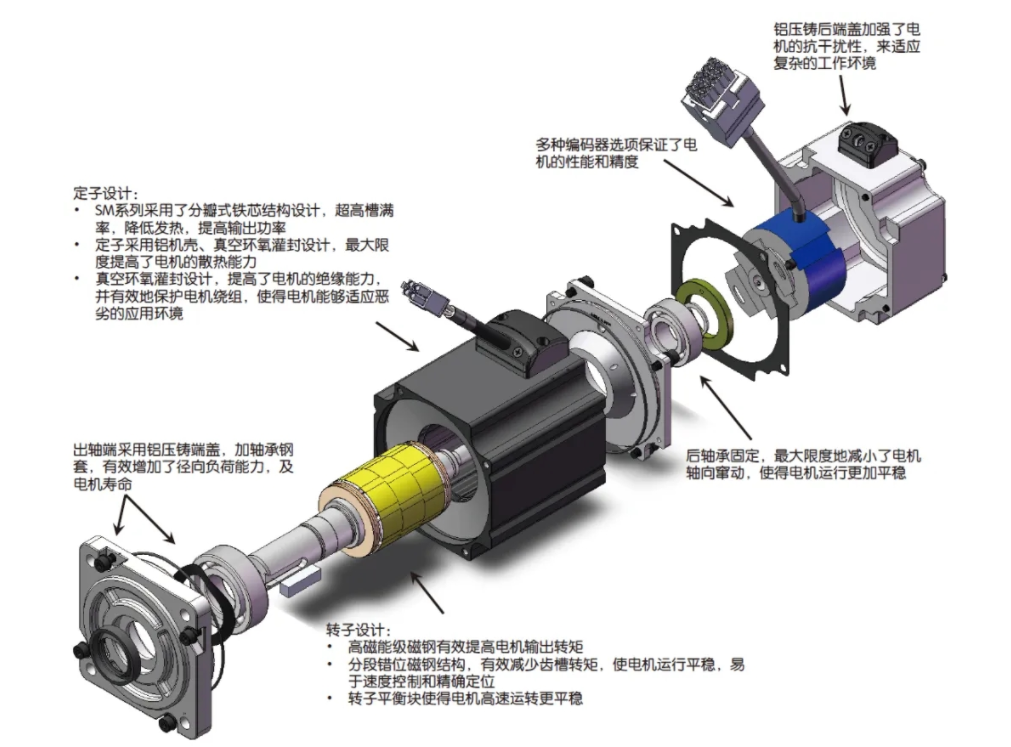
伺服电机是一个电机系统,它包含电机、传感器和控制器。直流无刷电机可以是伺服电机里面的一部分,交流电机也可以是,但他们并不是伺服电机。仅仅一台电机都不能算是伺服电机,因为他们并不具备伺服电机的功能。因此常常体积较大,大多数都用在比较精准的位置、速度或力矩输出。
步进电机英文是stepper/step/stepping motor。主要是依靠定子线圈序列通电,顺次在不同的角度形成磁场,推拉定子旋转。步进电机的好处是,你可以省掉用于测量电机转角的传感器。因此在结构上和价格上有一定的优势。而且它的位置和速度控制相对简单。其缺点是,第一,与同等功率的电机相比载荷比较小,没有角度传感器的情况下不能输出大力矩。第二,功耗相对较大,要么全开,要么全关。所以要么接近满功耗,要么就不能出力。
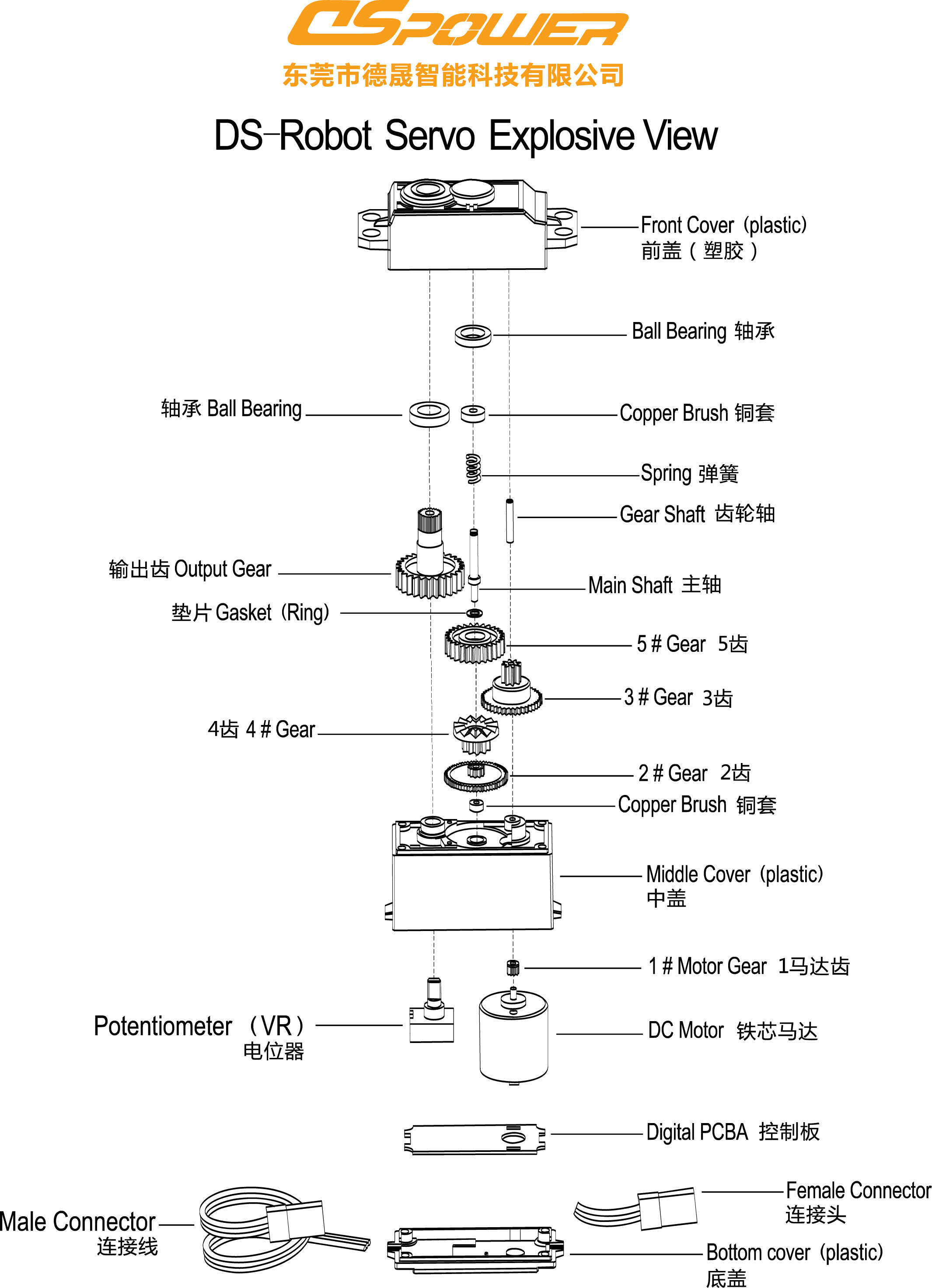
舵机是什么呢?舵机是个俗称,是玩航模、船模的人起的,因为它常用于舵面操控,其实就是一个简易的伺服电机系统,同时也是最常见的伺服电机系统,英文叫做Servo,就是Servomotor的简称。
以前的舵机就只是将PWM信号与滑动变阻器的电压相比对,通过硬件电路实现固定控制增益的位置控制。但经过多年的发展,舵机的技术性正在不断的提高。现在的不再只是通过简单的硬件电路实现固定控制增益的位置控制,而可以采用更复杂的控制策略和算法来实现更高级别的控制。例如,能够使用先进的控制算法如PID控制器、模糊逻辑控制器等来实现舵机的精确位置控制和速度控制,以满足一直在变化的应用需求。
此外,随着舵机技术的持续不断的发展,也出现了多种舵机接口协议和通信方式,如RS485、CAN、UART等,这些接口协议和通信方式能支持舵机之间的双向通信和数据交换,以实现更高级别的控制策略和更复杂的系统应用。
另外,还可以将舵机与传感器、执行器等别的设备进行组合应用,以实现更复杂的系统功能。例如,在机器人领域中,能够最终靠舵机控制机器人的关节运动,并使用传感器反馈机器人的位姿信息,以实现机器人的自主运动和智能控制。
也就是说,它本身就是一个完整的伺服电机系统,相对于伺服电机来说,成本更低,同扭矩积也更小,虽然精度没那么高,但操作更简单。
1、控制精度:步进电机经过控制脉冲数量做定位,而舵机则是根据设定的控制信号,按照设定的要求运行,能轻松实现精确的运动控制。
2、应用领域:步进电机多用于简单的位移控制,而舵机则更多应用在航模等有必要进行高精度姿态控制的领域。
3、负载能力:与步进电机相比,舵机的负载能力更强,可承受更大的外部阻力。
总的来说,与伺服电机相比,舵机是一个完整的伺服电机系统,但体积更小,成本更低,操作起来也更简单。这使得舵机在许多应用场景中成为伺服电机的优秀替代品,例如在无人机、模型制作等领域。虽然舵机的精度可能不如伺服电机,但它的体积小、重量轻、成本低以及简单易操作的特点使得它在许多应用场景中表现出色。而和步进电机相比,舵机的控制精度和负载能力都相对来说更加优秀,应用的范围也更广。
主要是看驱动器的电压等参数是不是基本一致的,匹配自己的电机是不是能够使用,一般来说是可以共用的。 怎样选择步进电机和驱动器? 1、判断需要多大的力矩 静扭矩是选择步进电机的主要参数之一。负载大时,需采用大力矩电机。力矩指标大时,电机外形也大。 2、判断电机运转速度 转速要求高时,应选相电流比较大的电机,以增加功率输入。且在选择驱动器时采用较高供电压。 3、选择电机的安装规格 如57/86/110等主要与力矩要求有关。确定定位精度和振动方面的要求情况:判断是否需细分。根据电机的电流、细分和供电电压选择驱动器。 步进驱动器的选型原则 1、驱动器的电流:电流是判断驱动器能力大小的依据,是选择驱动器的重要指标之一,通常驱动器的最大额定
随着大规模的公司自动化程度慢慢的升高,对伺服电机的要求也在提高,电机作为自动控制管理系统中的一类重要元件,其可靠性、精度和响应快慢直接影响到控制系统的工作性能,是不容忽视的重要环节。因此,伺服电机的ddc有着非常高的应用价值和广阔的应用前景。 伺服电机的传统操控方法 由于外部给定的电机速度为模拟量,常常需要a/d模块将模拟量转换成数字量,伺服电机驱动器接收到数字信号后再控制电机运转。这种传统的控制伺服电机驱动器的方法,应用时间长。但它的可靠性不高,存在某些特定的程度的零漂。同时考虑到a/d模块的费用,这种方法成本也就较高。 伺服电机的直接数字控制 随着电脑的飞速升级,微软开发的windows操作系统和可视化编程工具如:visual b
机器人在运行过程中,是通过伺服电机的驱动实现多自由度的运动的。如果对机器人运行的动作速度、精度要求高的话,实际就是要求伺服电机的响应速度、控制精度要足够高。因此,在选择伺服电机的时候,一定要把问题考虑周全 伺服电机选型要点有哪些: 有些系统如传送装置,升降装置等要求伺服电机能尽快停车,而在故障、急停、电源断电时伺服器没有再生制动,无法对电机减速。同时系统的机械惯量又较大,这时对动态制动器的要依据负载的轻重、电机的工作速度等做出合理的选择。 有些系统要维持机械装置的静止位置,需要电机提供较大的输出转矩,且停止的时间比较久。若使用伺服的自锁功能,往往会造成电机过热或放大器过载,这样的一种情况就要选择带电磁制动的电机。 有的伺服驱动器有
现代步进电机驱动系统通常使用集成电路功率芯片驱动电机运转,有时可能还会集成一些简单的控制功能,像电流控制。有些较先进的控制芯片还集成一个状态机,对步进电机的步进顺序进行一定的控制。一般而言,步进时序和运动曲线是由一个外部微控制器或专用的ASIC逻辑电路控制的。若需要控制多台电机,处理方法无非是给每台电机安装专用逻辑电路或者在微控制器上安装每台电机的控制系统软件。通过在一颗芯片上集成一个数字控制内核和驱动电路,意法半导体的新产品 L6470可简化多电机控制管理系统的设计。这款新IC采用电压控制模式,能够以1/128微步进管理用户设置的运动曲线,而且这些操作对主微控制器的负荷影响微乎其微。在采用该控制器的系统中,因为微控制器只需向控制器
系统设计 /
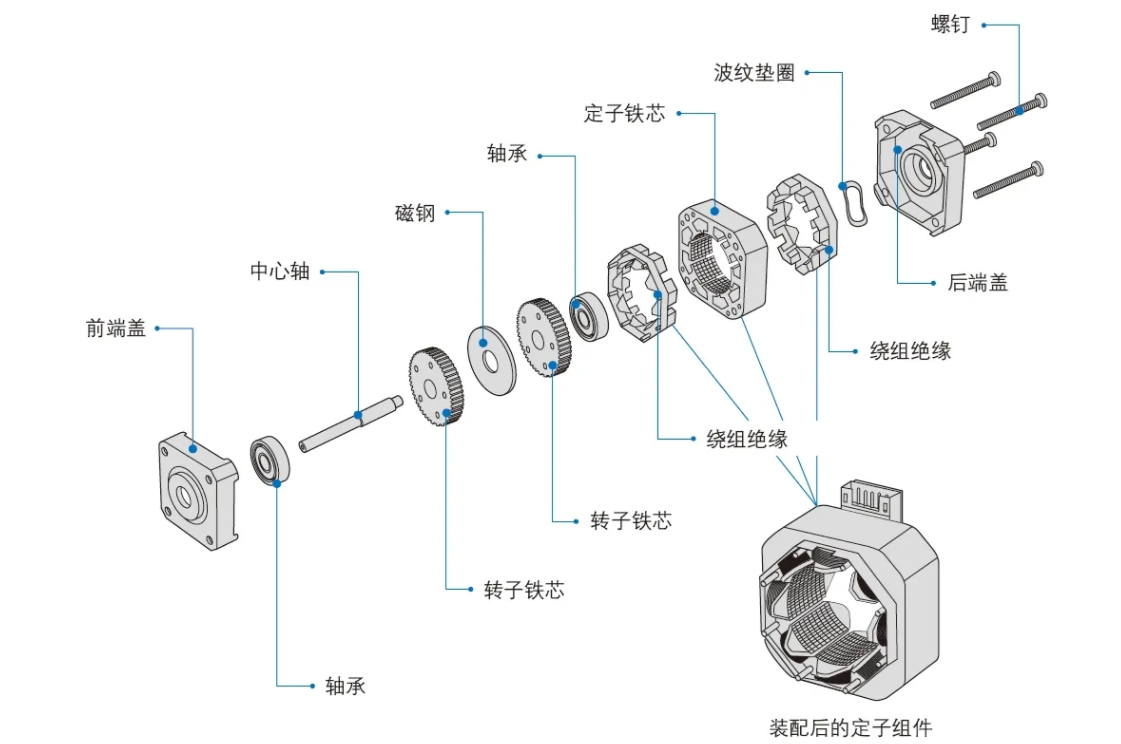
本文将为您介绍步进电机的基础知识,包括其工作原理、构造、操控方法、用途、类型及其优缺点。 步进电机基础知识 步进电机是一种通过步进(即以固定的角度移动)方式使轴旋转的电机。其内部构造使它无需传感器,通过简单的步数计算即可获知轴的确切角位置。这种特性使它适用于多种应用。 步进电机工作原理 与所有电机一样,步进电机也包括固定部分(定子)和活动部分(转子)。定子上有缠绕了线圈的齿轮状突起,而转子为 永磁体或可变磁阻铁芯。稍后我们将更深入地介绍不同的转子结构。图1显示的电机截面图,其转子为可变磁阻铁芯。 图1: 步进电机截面图 步进电机的基本工作原理为:给一个或多个定子相位通电,线圈中通过的电流会产生磁场,而转子会与该磁场对齐
知识科普(工作原理/构造/操控方法/用途/类型) /
一、 方案论证与比较 1、 本设计的重点在于对步进电机的控制和驱动,设计中受控电机为四相六线V) 方案一:使用多个功率放大器件驱动电机 通过使用不相同的放大电路和不同参数的器件,能够达到不同的放大的要求,放大后能获得较大的功率。但是由于使用的是四相的步进电机,就需要对四路信号分别进行放大,由于放大电路很难做到完全一致,当电机的功率较大时运行起来会不稳定,而且电路的制作也比较复杂。 方案二:使用L298N芯片驱动电机 L298N芯片可以驱动两个二相电机(如图1-1),也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来
德国艾尔默斯公司(Elmos)日前宣布推出可用于驱动双极性步进电机的单芯片控制器E523.30-38系列产品。该系列芯片集成了LIN/PWM通信接口和电机的上/下限位置(堵转位置)的无传感器检测功能,可以将执行器集成到一个已有的LIN总线网络中,其中部分产品带有LIN总线自动寻址功能。同时,该芯片还集成了双向PWM通信接口。 另外,该系列芯片还具有3个GPIO端口,可用于多达3个霍尔传感器或者电位器信号输入,同时也可以直接集成到执行器中,以节省更多的设计空间。 该系列芯片自身内嵌了一个8位微控制器,带有8k的FLASH、64byte的EEPROM等,以及4k的SysROM,可用于通过LIN总线进行程序刷新。工作
控制器 /
步进电机每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角度输入的脉冲数成正比,转速与脉冲频率成正比。它的驱动方式也比普通的有刷直流电机复杂。 本节我们就来讲讲步进电机最基础的驱动方式。 1)步进电机的内部结构 先粗略地介绍一下主要的两种步进电机:单极性和双极性。 如下图所示,左边是单极性电机;右边是双极性电机。单极性电机线圈内的电流只有一个方向,双极性电机线圈内的电流是双向的: 而相数,则是内部线圈的组数;一般的步进电机都可以看作是两相电机变化而来的。 本文个人会使用最简单的五线),驱动方法也都是以它来讲的,其他种类的大同小异。就是如下图这种步进电机,以及驱动板: 它内部的接线
的内部结构与驱动方法 /
及其控制 (寇宝泉,程树康编著)
驱动控制技术及其应用设计研究
嵌入式工程师AI挑战营(初阶):基于RV1106,动手部署手写数字识别落地
有奖直播 瑞萨新一代视觉 AI MPU 处理器 RZ/V2H:高算力、低功耗、实时控制
消息称三星电子在硅谷开设先进处理器实验室,聚焦 RISC-V IP 开发
4 月 19 日消息,据韩媒 Sedaily 报道,三星电子通过旗下三星综合研究院(SAIT,Samsung Advanced Institute of Technology)在美 ...
一、定义与作用视频拼接控制器也称视频处理器,在液晶拼接屏中起了重要的作用,它是大屏拼接系统中的核心设备,但正如主机需要CPU一样,液晶 ...
100W音频功率放大器由运算功率放大器集成电路LM12CLK供电。该单片IC可以向 4Ω 负载提供 80W 正弦波功率,失线%。功率带宽为 ...
构建放大器简单,使用标准且稳定可靠。这里介绍的 75 W 放大器电路能够驱动 4 欧姆,但是,尽管用于 4 欧姆,该放大器的误差非常小 ...
这是一款8Ω负载下的12W小型功率放大器,将NE5534集成技术与晶体管作为V-MOSFET输出级相结合,获得出色的音质。输入灵敏度最大为 3Vrms,1 ...

站点相关:嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科